

The StackForce Quadruped Robot Kit with Joint Motors is a programmable STEM robotics platform designed for developers, educators, and makers. Built on the StackForce lightweight robotics development framework, this modular robot kit combines two dual-wheeled robots with a central connector module to form a quadruped robot dog. The assembly is quick and intuitive, with no complex debugging required.
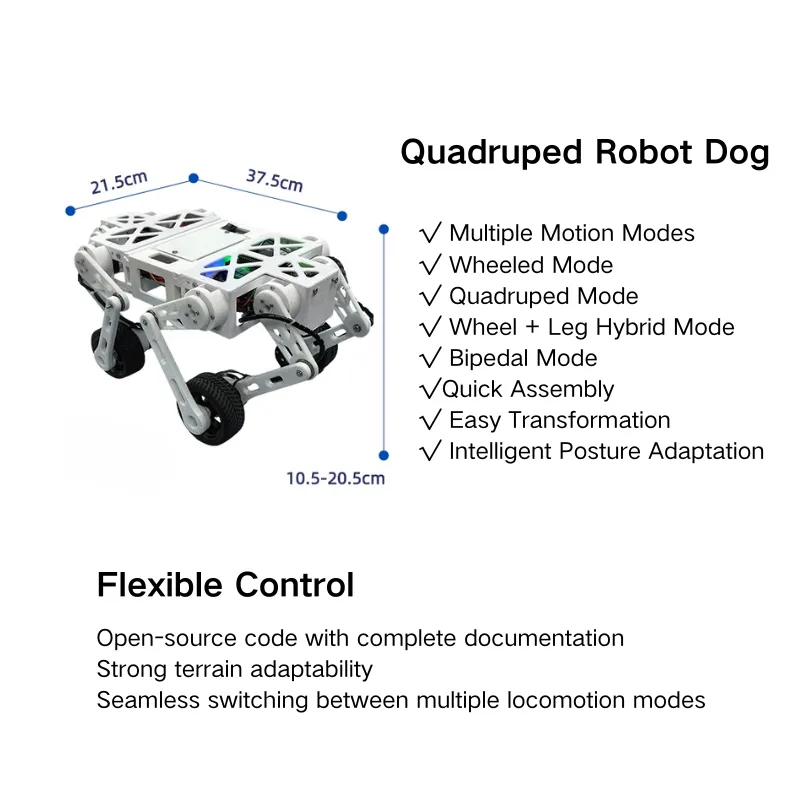
Supporting multiple locomotion modes—including wheeled driving, bipedal walking, and quadruped stepping—this programmable quadruped robot delivers advanced motion capabilities such as high-step walking, dynamic balance, in-place turning, and agile mobility. With its built-in kinematics model and adaptive stabilization algorithm, the robot achieves smooth performance on flat ground, slopes, and uneven terrain, making it ideal for educational robotics, research projects, and DIY developers.
Open-source and highly versatile, the StackForce quadruped robot kit supports multiple control methods such as RC transmitter, Bluetooth, serial, and wireless communication, empowering users to customize motion control and expand functionality.
References: https://gitee.com/StackForce
Key Features
- Modular Design – Easily transforms from two dual-wheeled robots into a full quadruped robot dog.
- Multiple Locomotion Modes – Supports wheeled driving, bipedal walking, and quadruped stepping for diverse robotics applications.
- Joint Motors + CAN/485 Communication – Smooth, stable motion with strong expandability.
- Advanced Control Algorithms – Includes full-body kinematics and adaptive stabilization for slope climbing, obstacle crossing, and rough terrain.
- Programmable & Open Source – Fully open control code, ideal for STEM education, robotics research, and maker projects.
- Multi-Mode Control – Compatible with RC transmitter, Bluetooth, serial, and wireless modules.
- Compact & Lightweight – Only 1.3 kg with 12.6V LiPo battery, portable yet powerful.
Quadruped Robot Kit Course Description
The StackForce Quadruped Robot Kit Training Course is a hands-on STEM robotics learning program designed for students, developers, and makers who want to master quadruped robot control, locomotion planning, and programmable robotics development.
Based on the StackForce modular robot kit with joint motors, this course covers the full workflow of building, configuring, and programming a quadruped robot dog. Learners will explore multiple locomotion modes (wheeled, bipedal, quadruped), study kinematics and control algorithms, and practice implementing adaptive terrain navigation and stabilization.
By the end of the course, participants will gain a complete understanding of robotics motion control, CAN communication, and open-source programming, enabling them to apply their knowledge in research projects, STEM education, and robotics competitions.
Chapter 1: Concept & System Setup
- Introduction to quadruped robot kits and locomotion modes
- Mechanical structure & system architecture
- Dual-wheel to quadruped transformation and communication
Chapter 2: Module Control
- Sensor integration: IMU, wheel speed, remote signals
- Leg joint motor control & kinematic analysis
- Multi-leg coordination and wheel-leg synchronization
Chapter 3: Wheeled Motion Control
- Basic driving: forward, backward, turning, spinning
- Heading correction, speed planning, acceleration limits
- Programming implementation
Chapter 4: Quadruped Motion Control
- Gait planning principles
- Walk, Trot, Pronk, and Bound gait control
- Algorithm + code implementation
Chapter 5: Wheel + Leg Coordination
- Hybrid locomotion optimization
- Dynamic stability and high-mobility movements
- Advanced robotics control programming
Chapter 6: Bipedal Motion Control
- Balance & posture maintenance
- Bipedal gait planning and turning coordination
Chapter 7: Complex Terrain Adaptation
- Active suspension in wheeled mode
- Stability on slopes & uneven ground
- Intelligent mode switching & adaptive optimization
Learning Outcomes
- Master quadruped robot control algorithms
- Gain hands-on skills in robotics kinematics & programming
- Learn wheel, bipedal, and quadruped gait control
- Implement CAN communication and joint motor control
- Apply knowledge to STEM projects, R&D, and robotics competitions
Quadruped Robot Kit Applications
- STEM Education & Learning – Hands-on teaching tool for programming, kinematics, and robotics.
- Research & Development – Suitable for robotics projects, AI motion control, and adaptive locomotion studies.
- DIY & Maker Communities – Perfect for developers who want to build and program a programmable quadruped robot kit.
- Terrain Adaptation Experiments – Test motion control across flat surfaces, slopes, rough ground, and obstacle-crossing scenarios.
- Robotics Competitions & Demonstrations – Showcases advanced locomotion and joint motor control in an engaging, modular robot platform.
Reviews
There are no reviews yet.