The MTF-01P Optical Flow & Range Sensor is a high-precision sensor that integrates optical flow detection and range measurement capabilities, widely used in fields such as robotics, drones, and industrial automation. This sensor leverages advanced optical flow technology to track real-time motion relative to the surrounding environment or ground, while also providing accurate distance measurements between the sensor and target objects. Whether in GPS-denied environments or dynamic indoor scenarios, it offers stable and reliable positioning and navigation data, making it an ideal choice for high-precision motion control, obstacle avoidance systems, and localization tasks.
The optical flow functionality enables the device to detect and analyze its motion relative to surfaces or the ground by capturing changes in surface patterns, which are then used to calculate velocity, direction, and displacement. The range-sensing feature, typically based on laser or ultrasonic technology, allows the sensor to measure the distance between the sensor and surrounding objects in real time, providing essential spatial data for avoiding collisions and enabling precise navigation. The integration of both functions into a single sensor enhances accuracy and reduces error, making the MTF-01P highly suitable for dynamic and complex environments, especially in drones, robots, and autonomous systems requiring real-time dynamic control.

Key Features:
- Optical Flow Sensing:
- Utilizes optical flow technology to detect motion relative to the ground or surrounding surfaces.
- Capable of measuring velocity, direction, and displacement by analyzing visual patterns in the environment.
- Ideal for applications where GPS or other positioning systems are unavailable, providing robust indoor navigation.
- Range Sensing:
- Includes a range-finding function to measure the distance between the sensor and the surrounding objects or ground.
- Provides accurate measurements to help with obstacle avoidance and depth sensing.
- High Precision:
- Offers high accuracy and low latency, crucial for real-time navigation and control systems in autonomous vehicles or robots.
- Can operate in various lighting conditions, including low-light environments, thanks to advanced optical algorithms.
- Multi-functional Integration:
- Combines both optical flow and range detection in a single sensor, reducing the need for multiple sensors and simplifying system integration.
- Ideal for applications requiring simultaneous motion tracking and distance measurements.
- Low Power Consumption:
- Designed with power efficiency in mind, making it suitable for battery-operated devices like drones or robots.
- Compact Design:
- Small form factor allows for easy integration into various systems without occupying much space.
- Versatile Applications:
- Frequently used in unmanned aerial vehicles (UAVs), mobile robots, autonomous systems, and even in augmented reality (AR) applications where precise tracking of movement is necessary.
- Easy Integration:
- Typically provides an easy-to-use interface (e.g., I2C, UART, or SPI) for integration with microcontrollers or embedded systems.
Applications:
- Drones: Enhances the stability of flight by providing precise control over the drone’s velocity and altitude without relying on GPS.
- Robotics: Used for indoor navigation, allowing robots to detect and avoid obstacles, maintain position, and navigate autonomously.
- Autonomous Systems: Integral for indoor or GPS-denied navigation, enabling robots and vehicles to operate effectively in environments where traditional navigation methods fail.
- Industrial Automation: Can be used in precision machinery and automated systems where real-time movement tracking is crucial.
Documents
MicoAssitant software can used for configure protocol or other parameter of MTF-01P.
Download it from here.
Protocols
MTF-01 module integrated with multiple protocols,include:
- Micolink — a custom protocol, can support FMT
- MSP — support INAV
- Mavlink_APM — the mavlink protocol that can support Ardupilot
- Mavlink_PX4 — the mavlink protocol that can support PX4
Set up protocol by using MicoAssistant
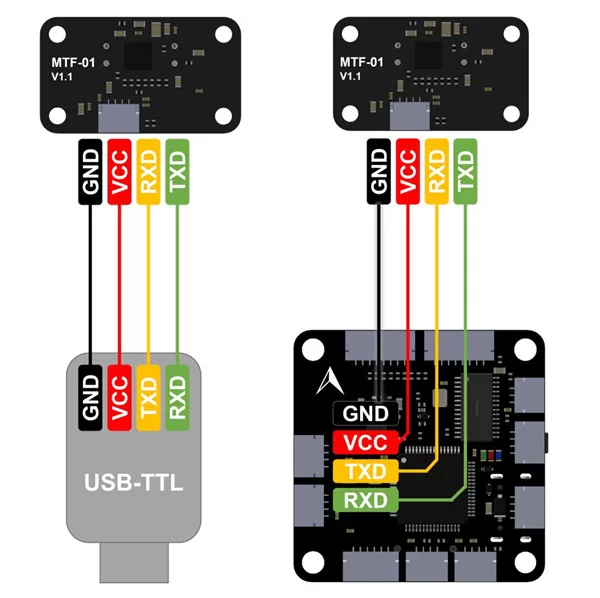
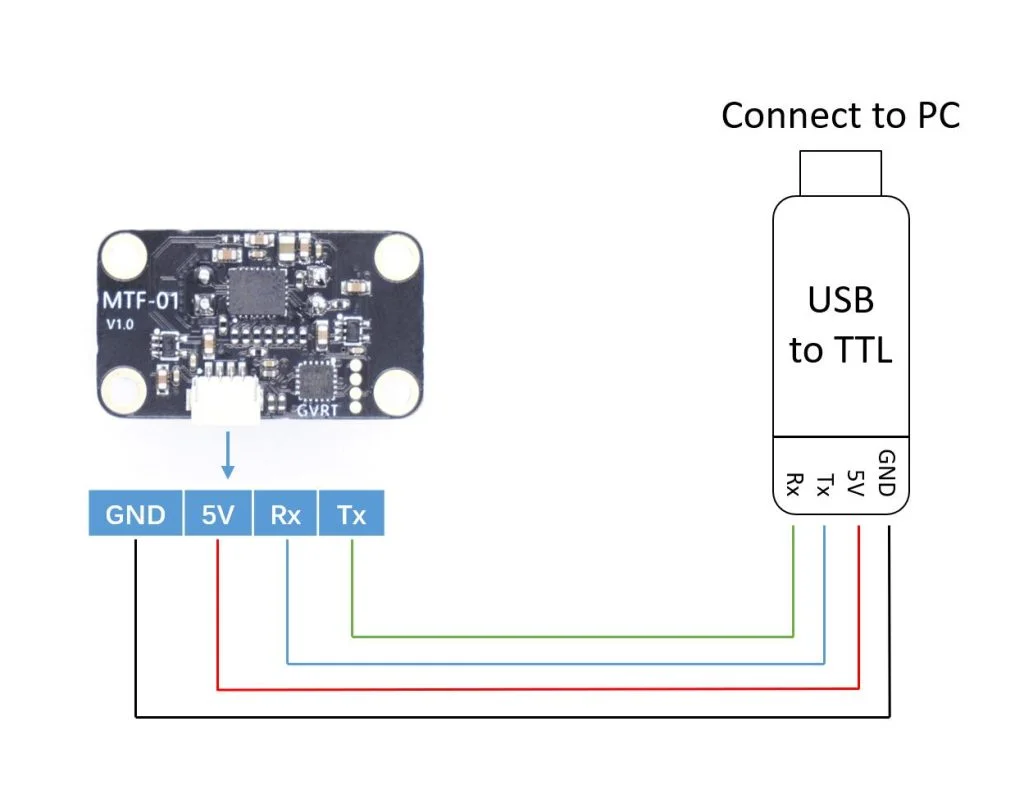
- Step1 : Connect the MTF-01 to PC by using the USB to TTL module.

- Step2: Open the windwos device manager and check if the USB module has been recognized.
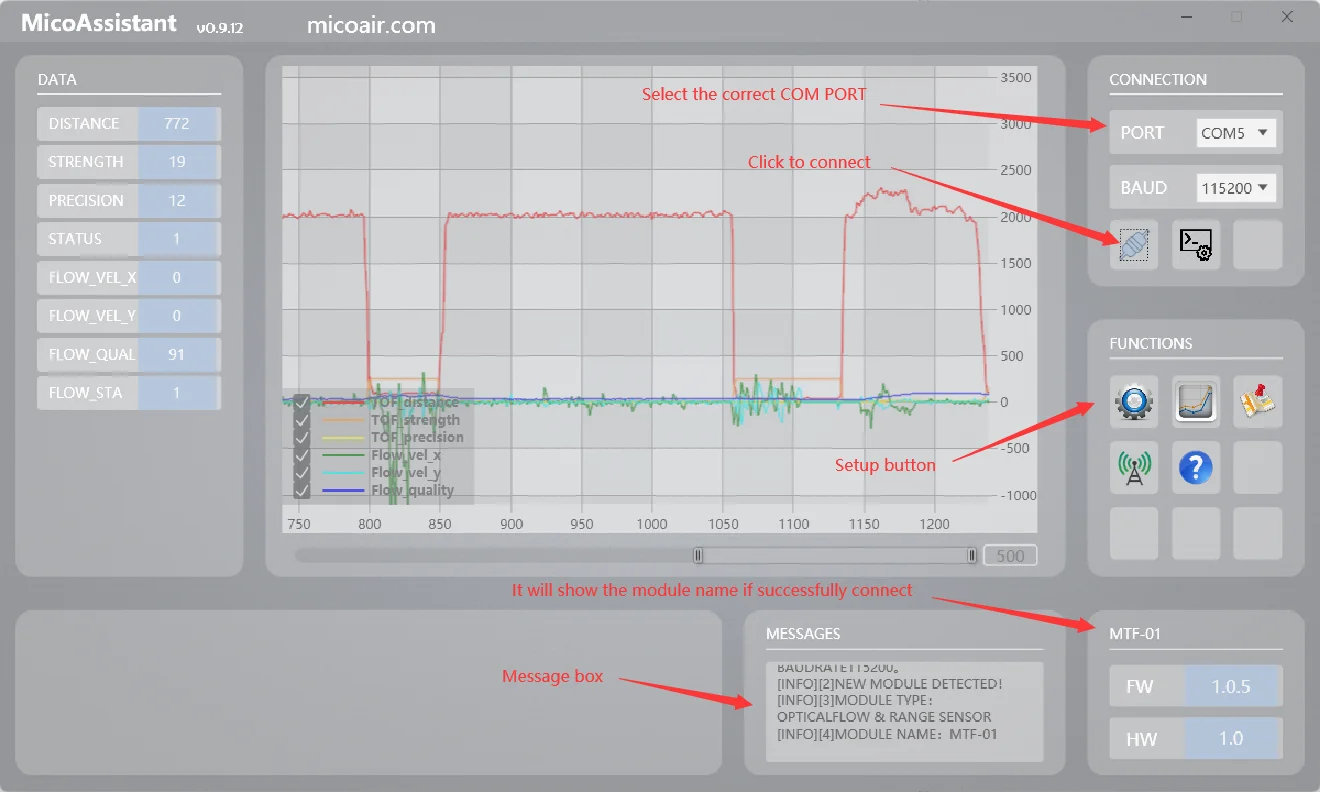
- Step3: Open the MicoAssistant software, select the correct COM in the upper right corner, baudrate should be 115200, and then the connection icon.

- Step4: If the MTF-01 has been successfully connected, the software will recognize it, and will output some messages and display the firmware version in the lower right corner. Then you can click the “SETUP”(gear) icons to open the setup page, it will happens nothing if there is any wrong with the connection, and you should check the previous
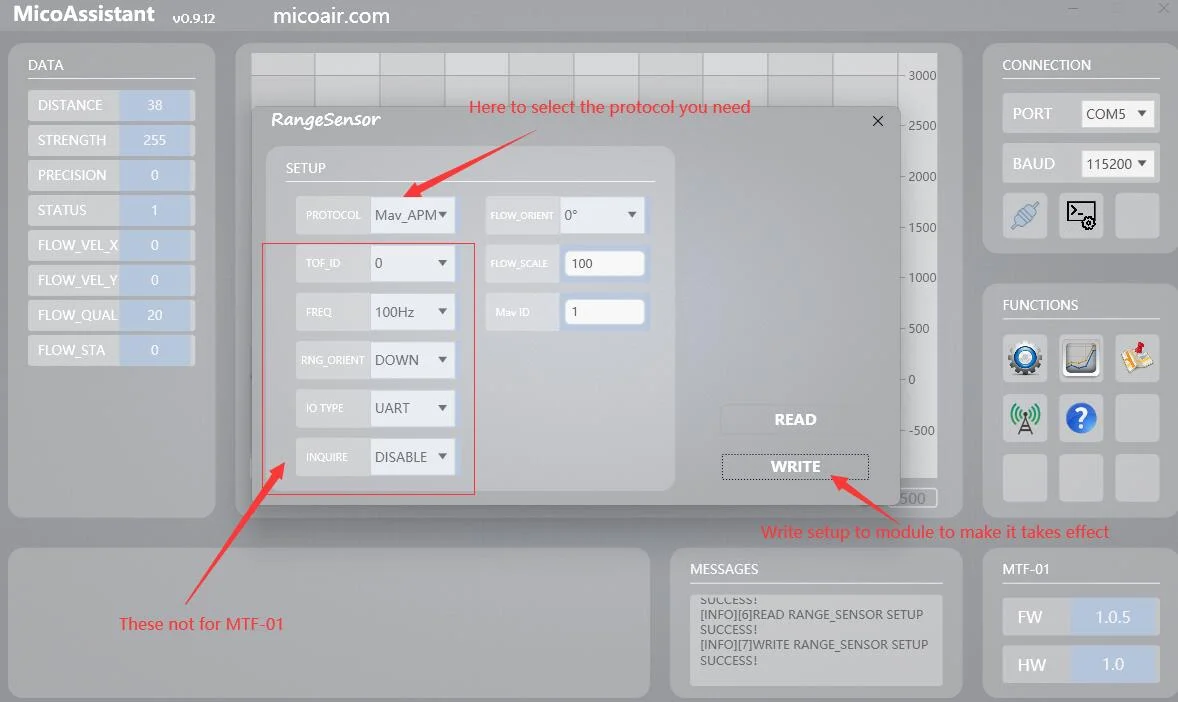
- Steps5: Select the protocol you want to use in the setup page, and then click the write button, the output protocol of the module will be successfully modified, and the software message box should display a message that the setting is successful.

Attention
The MicoAssistant software may crash in some language versions of Windows systems. You can try using the “no_chart” version.
Micolink
The micolink is a lightweight protocol customized by MicoAir Tech, prepared for developers who are ready to write their own code to read sensor data.
Tutorial
Setup Optic Flow&Lidar(MTF-01) For Ardupilot&PX4 To Make Drones Hover And Fly Indoors Better (youtube.com)
Step 1:
Configure the MTF-01 output protocol as “mav_apm”, by using MicoAssitant.
Step 2:
Connect the MTF-01 module to the serial port of the flight controller, such as Telem2 on pixhawk.
Step 3:
Configure these parameters in the Mission Planner
SERIALn_BAUD 115
SERIALn_OPTIONS 1024
SERIALn_PROTOCOL 1
FLOW_TYPE 5
RNGFND1_TYPE 10
n depends on which serial port the MTF-01 connected, for example, n=2 when it connect to Telem2.
Step 4:
After that, we need to reboot the flight controller or just refresh the parameters in Mission Planner.
And then these parameters need to be configured.
RNGFND1_MAX_CM 800
RNGFND1_MIN_CM 1
RNGFND1_ORIENT 25
When you complete the above steps, you should be able to observe the optical flow and range sensor data on the Mission Planner’s “Status” page. The “opt_qua” and “rangefinder1” should have some value.
Step 5:
After the flight controller has recognized MTF-01, we need to perform some configurations so that the sensor data can be used in EKF fusion.
If you just need to use optical flow to fly indoors and don’t consider using GPS outdoors, then you only need to configure EK3_SRC1.
AHRS_EKF_TYPE 3
EK3_SRC_OPTIONS 0
EK3_SRC1_POSXY 0
EK3_SRC1_POSZ 2
EK3_SRC1_VELXY 5
EK3_SRC1_VELZ 0
EK3_SRC1_YAW 1
But if you need to take into account both indoor and outdoor environments, then you may need to use a method that can switch the EK3 data source. Keep the EK3_SRC1 as default, and set EK3_SRC2 as follows.
AHRS_EKF_TYPE 3
EK3_SRC_OPTIONS 0
EK3_SRC2_POSXY 0
EK3_SRC2_POSZ 2
EK3_SRC2_VELXY 5
EK3_SRC2_VELZ 0
EK3_SRC2_YAW 1
Then set the RC6 channel to switch using optical flow as EKF3 source.
RC6_OPTION 90
Now you can use RC6 channel to switch between using SRC1 or SRC2 as the data source of EK3.
When the RC6 value is in the low position, SRC1(GPS) will be used, and in the middle position, SRC2(Optical flow)will be use.
Step 6:
When all settings are completed, switch to loiter mode, unlock and take off.
Sometimes the flight controller may not be allowed to unlock in Loiter mode when the sensor is too close to the ground. You can unlock it in Althold mode and then switch to Loiter mode after taking off.
Setup Tutorial For INAV
Setup Optic Flow&Lidar(MTF-01) For INAV6 To Make Drones Hover And Fly Indoors Better (youtube.com)
Note: INAV 7.1.1 may have some bugs that can not work properly with the sensor. You need to upgrade to version 7.1.2 which have been tested well.
Setup Tutorial For PX4
Setup Optic Flow&Lidar(MTF-01) For Ardupilot&PX4 To Make Drones Hover And Fly Indoors Better (youtube.com)
PX4(1.11.x – 1.13.x):
MAV_1_CONFIG TELEMn
(n depends on which serial port you connect to)
Reboot the flight controller
MAV_1_MODE Normal
SER_TELn_BAUD 115200 8N1
SENS_FLOW_ROT No rotation
EKF2_AID_MASK use optical flow
EKF2_RNG_AID Range aid enable
EKF2_HGT_MODE Range sensor
PX4(1.14 )
MAV_1_CONFIG TELEMn
(n depends on which serial port you connect to)
Reboot the flight controller
MAV_1_MODE Normal
SER_TELn_BAUD 115200 8N1
EKF2_OF_CTRL Enabled
EKF2_RNG_CTRL Enabled
EKF2_HGT_REF Range sensor
Reboot the flight controller
SENS_FLOW_ROT No rotation





Reviews
There are no reviews yet.