
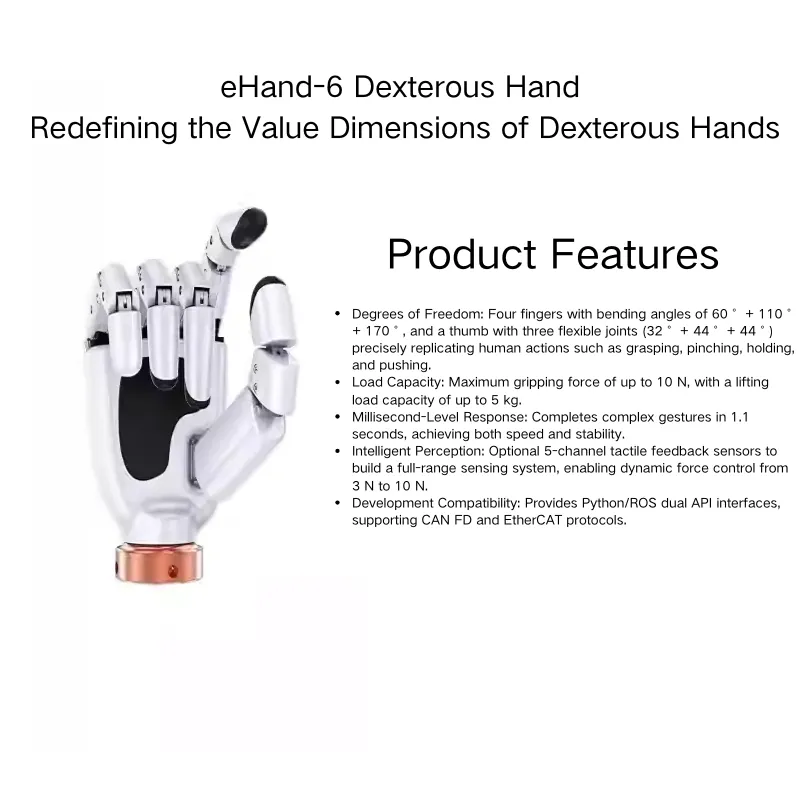

The eHand-6 Dexterous Hand is a 6-DOF bionic humanoid hand designed for high-precision grasping, pinching, holding, and pushing. With lifelike motion replication, millisecond-level responsiveness, and optional intelligent tactile feedback, it delivers exceptional performance for research, robotics, and industrial automation. The eHand-6 combines a compact form factor with strong gripping force, enabling both delicate handling and heavy-load operations. Compatible with Python and ROS APIs, it supports CAN FD and EtherCAT protocols for seamless integration into advanced robotic systems.
Features
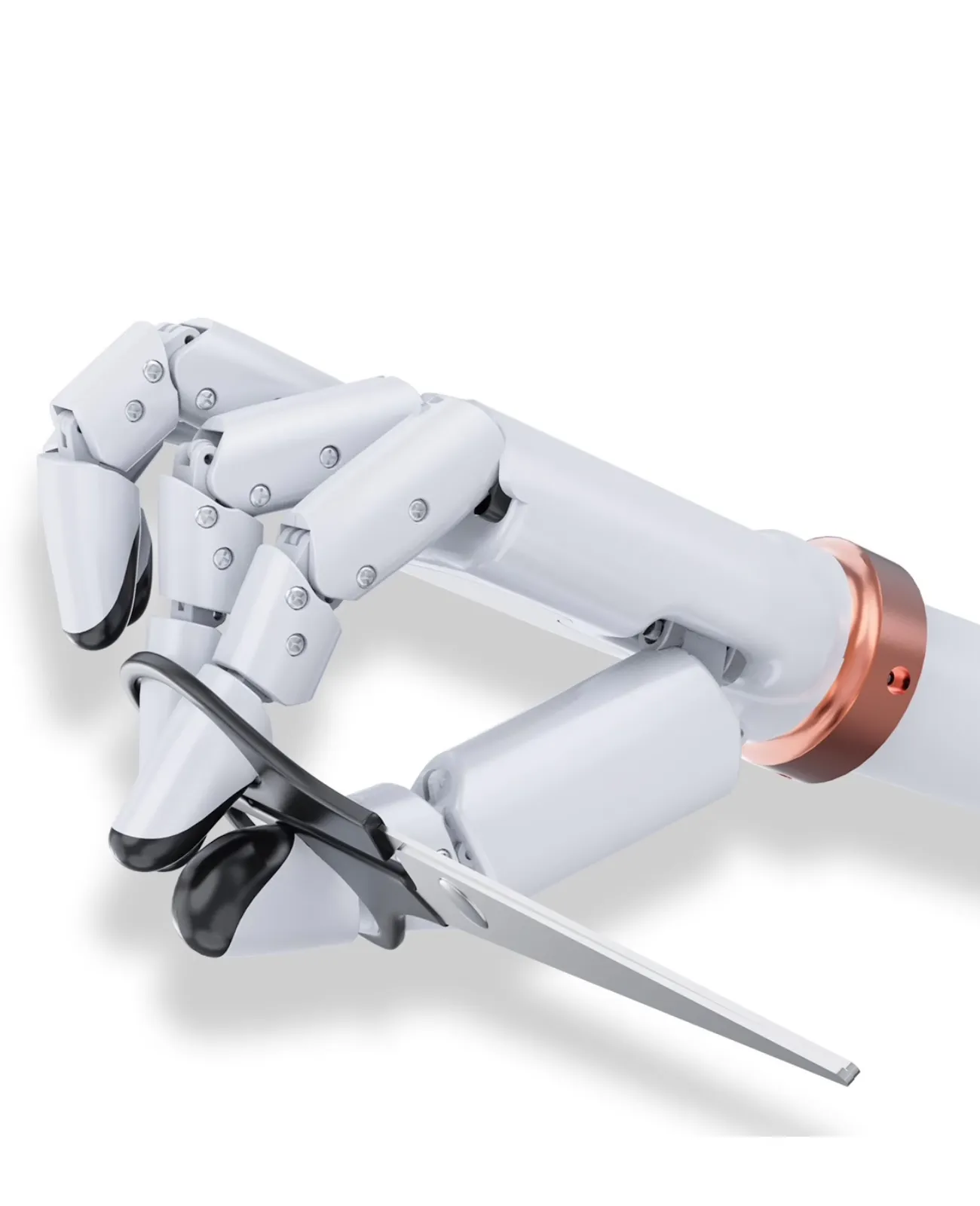
- 6 Degrees of Freedom – Realistic finger and thumb joint movement, precisely replicating human grasping, pinching, holding, and pushing.
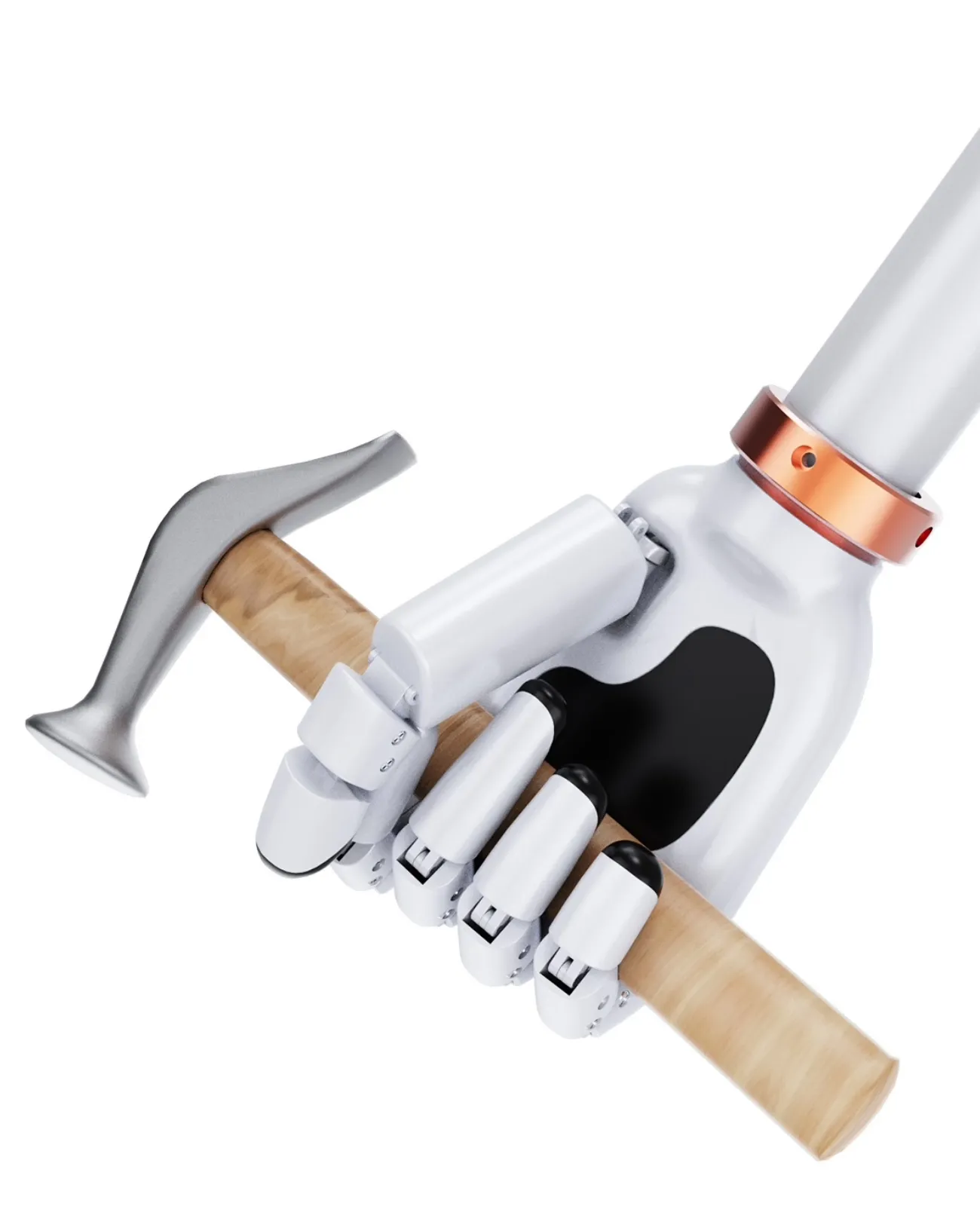
- High Load Capacity – Delivers up to 10 N gripping force and lifts loads up to 5 kg.
- Fast Response – Executes complex gestures in just 1.1 seconds with stable performance.
- Intelligent Sensing – Optional 5-channel tactile feedback system for dynamic force control (3 N–10 N).
- Flexible Grasping – Handles both delicate objects and heavy items with precision.
- Compact & Lightweight – Weighs under 800 g with a slim 220 × 88 × 52 mm profile.
- Strong Drive Mechanism – Coreless DC motor with planetary gearbox, lead screw, and linkage for smooth, powerful motion.
- Developer-Friendly – Supports Python/ROS APIs, CAN FD, and EtherCAT protocols for easy integration into robotic systems.

Applications
- Robotics Research – Ideal for universities and research institutes studying dexterous manipulation, grasping algorithms, and humanoid robotics.
- Service Robots – Enables natural and precise interaction in service, healthcare, and companion robots.
- Industrial Automation – Performs flexible yet strong gripping in assembly lines, packaging, and material handling.
- Teleoperation & VR/AR – Enhances remote manipulation and immersive simulation with realistic hand movement and tactile feedback.
- Prosthetics Development – Serves as a testing platform for advanced bionic prosthetic hand technology.
Reviews
There are no reviews yet.