

DM-J4340-2EC Robotic Actuator Motor Specifications
| Parameter Category | DM-J4340-2EC (24V) | DM-J4340-2EC (48V) |
| Rated Torque | 9 Nm | 9 Nm |
| Peak Torque | 27 Nm | 27 Nm |
| No-Load Max Speed | 52 rpm | 100 rpm |
| Rated Current | 2.5 A | 2.5 A |
| Peak Current | 8 A | 8 A |
| Outer Diameter | 57 mm | 57 mm |
| Height | 53.3 mm | 53.3 mm |
| Weight | ~362 g | ~362 g |
| Encoder | Dual 14-bit magnetic encoder | Dual 14-bit magnetic encoder |
What These Parameters Mean
- 9 Nm Torque: Enough to easily drive a 5–10 kg robotic arm joint.
- 27 Nm Peak Torque: Can handle short bursts of ‘heavy-duty’ operations, like lifting a relatively heavy load.
- Dual 14-bit Encoder: Provides very high positioning accuracy, so the motor moves smoothly with almost no ‘shaking’ during motion.
Three Operating Modes – Like Switching ‘Driving Styles’
he DMBOTs DM-J4340-2EC Robotic Actuator Motor supports three common modes, which you can think of as different driving styles for the motor.
MIT Mode – ‘Smart Driving’
In MIT Mode, the motor follows the original MIT control logic, allowing you to flexibly set limits for position, velocity, and torque.
The MIT Mode of the DMBOTs DM-J4340-2EC Robotic Actuator Motor is specially designed to be compatible with the original MIT control logic. This means you can switch to it seamlessly and still flexibly set control limits, including P_MAX (position limit), V_MAX (velocity limit), and T_MAX (torque limit).
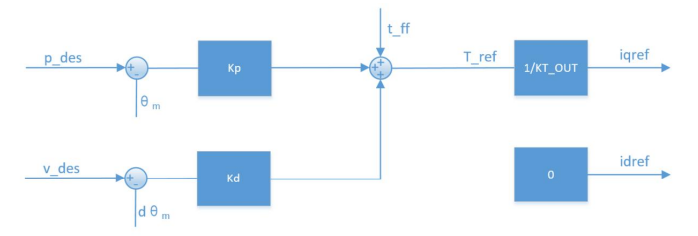
How it works under the hood: The motor driver takes the incoming CAN bus data (control commands), translates it into control variables, and then calculates the torque value. This torque is passed to the current loop, which regulates the motor’s phase current so that the actual output torque matches your target. 👉 In short: You give high-level commands → driver converts → current loop executes → motor produces the desired torque.
Here’s a simple control block diagram for MIT Mode:
Example Cases
Case 1: Constant Speed
If you want the motor to spin at a steady speed, set kp = 0 (ignore position), keep kd ≠ 0, and give a target speed v_des.
👉 The motor will act like a spring pulling with steady force.
⚠ Important Safety Tip: If you are controlling position but accidentally set kd = 0, the system may oscillate or even go unstable. It’s like driving a car downhill with broken brakes — risky and unsafe. Always keep a proper damping gain!
Position-Velocity (Cascaded Position) Mode — imilar to ‘Autonomous Navigation’
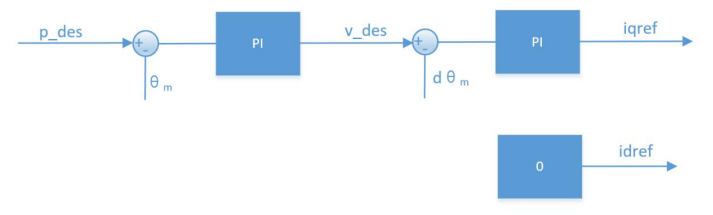
Position-Cascaded Mode uses a three-loop cascade control, where:
- The outer loop is the position loop, whose output serves as the setpoint for the velocity loop.
- The velocity loop output serves as the setpoint for the inner current loop, which controls the actual current output. The control block diagram is as follows:
p_desis the target position for control.v_desis used to limit the maximum absolute speed during motion.
Example: Suppose you want the motor to move to 90° (
p_des = 1.57 rad), but you want to limit its speed. You can set a maximum speed v_des. The motor will then reach the target smoothly following the sequence: accelerate → constant speed → decelerate.The control block diagram is shown below:
Practical Case: Move the motor to 90° (
1.57 rad) while limiting the maximum speed to 5 rad/s:👉 The motor will first accelerate, then decelerate smoothly, stopping precisely at 90°.
Advantages:
- High precision
- Smooth motion
- Suitable for robot joint movements, e.g., slow grasping with a robotic arm
Disadvantages:
- Slightly slower response
- Not suitable for scenarios requiring ‘lightning-fast’ movements
Additional Notes:
- When using the recommended parameters from the debugging assistant, good control accuracy can be achieved and the motion remains relatively smooth, though the response time is longer.
- Besides
v_des, you can also configure acceleration and deceleration values. Increasing them may reduce oscillations during motion. - Units:
p_desin rad,v_desin rad/s, data type: float. - The damping factor must be a positive number greater than 0. For reference, see the notes for Velocity Mode.
Velocity Mode — Similar to ‘Cruise Control’
Velocity Mode is used to make the motor run at a constant speed.
- For example, if you want a wheeled robot to move continuously at 50 rad/s, you can simply set
v_des = 50, and the motor will maintain that speed steadily.
The control block diagram is shown below:
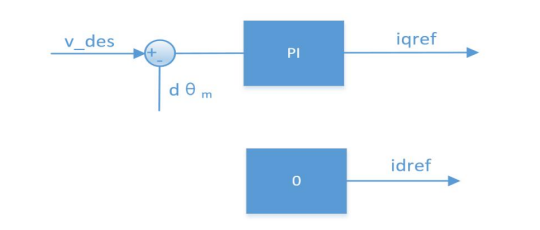
Practical Case: Keep the motor running at 50 rad/s:

Your blog is a constant source of inspiration for me. Your passion for your subject matter is palpable, and it’s clear that you pour your heart and soul into every post. Keep up the incredible work!
Your writing is like a breath of fresh air in the often stale world of online content. Your unique perspective and engaging style set you apart from the crowd. Thank you for sharing your talents with us.
helloI like your writing very so much proportion we keep up a correspondence extra approximately your post on AOL I need an expert in this space to unravel my problem May be that is you Taking a look forward to see you
Your blog is a true hidden gem on the internet. Your thoughtful analysis and engaging writing style set you apart from the crowd. Keep up the excellent work!
I have been surfing online more than 3 hours today yet I never found any interesting article like yours It is pretty worth enough for me In my opinion if all web owners and bloggers made good content as you did the web will be much more useful than ever before
Thank you for the good writeup It in fact was a amusement account it Look advanced to far added agreeable from you However how could we communicate
If you have any questions, please feel free to contact us via email. We’ll be happy to answer them, and more practical articles will be published later.
Your blog is a true hidden gem on the internet. Your thoughtful analysis and engaging writing style set you apart from the crowd. Keep up the excellent work!
Ive read several just right stuff here Certainly price bookmarking for revisiting I wonder how a lot effort you place to create this kind of great informative website
I just could not leave your web site before suggesting that I really enjoyed the standard information a person supply to your visitors Is gonna be again steadily in order to check up on new posts
Your writing is like a breath of fresh air in the often stale world of online content. Your unique perspective and engaging style set you apart from the crowd. Thank you for sharing your talents with us.
I just wanted to express my gratitude for the valuable insights you provide through your blog. Your expertise shines through in every word, and I’m grateful for the opportunity to learn from you.
Your ability to distill complex concepts into digestible nuggets of wisdom is truly remarkable. I always come away from your blog feeling enlightened and inspired. Keep up the phenomenal work!