


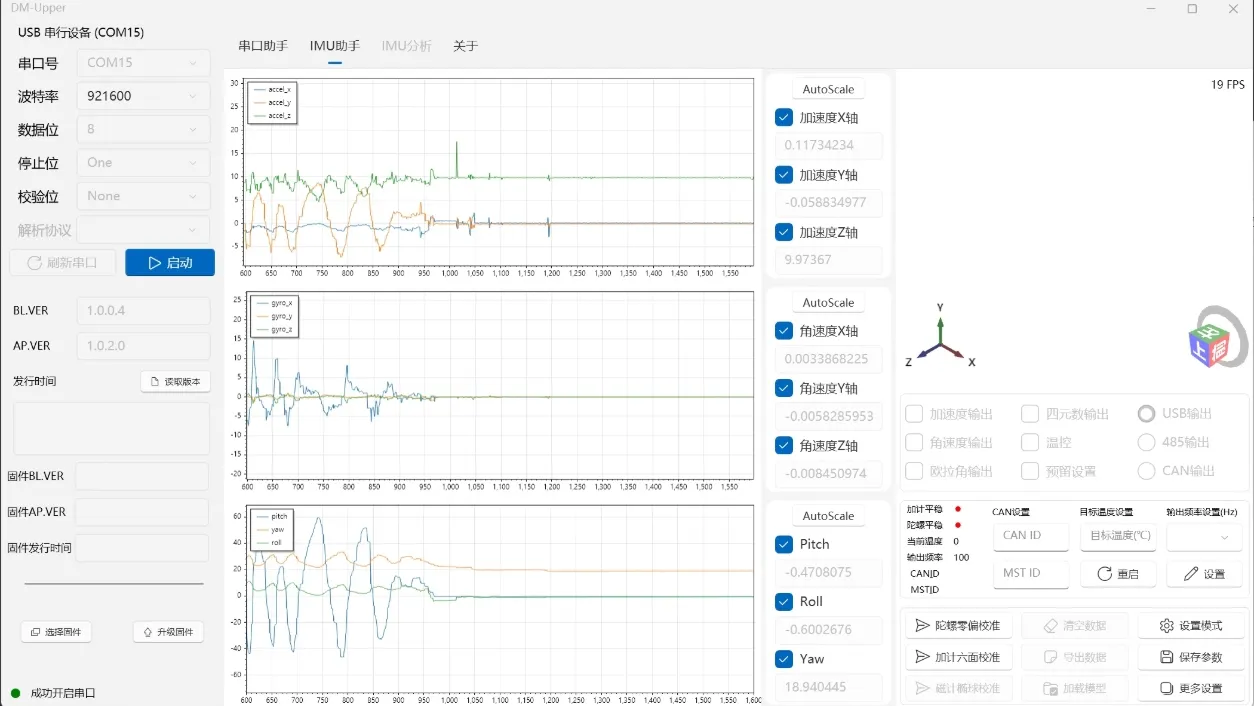
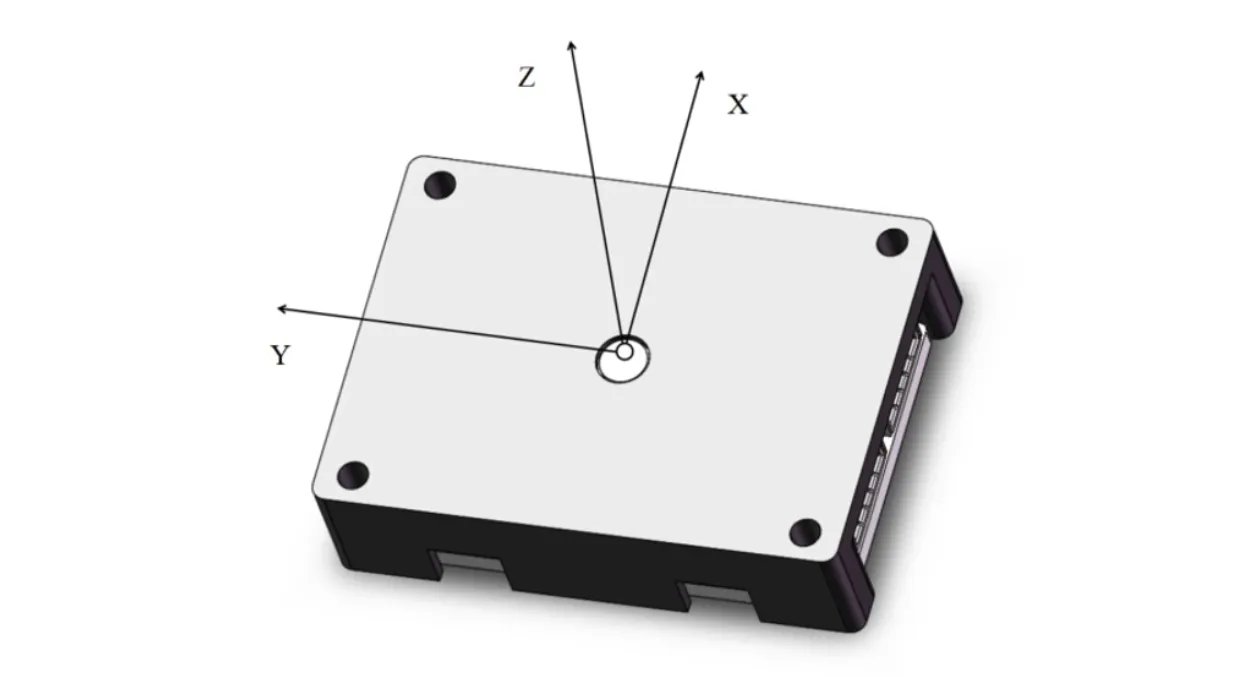
The DM-IMU-L1 is a high-performance inertial measurement unit (IMU) integrating the BMI088 6-axis MEMS sensor, which combines a 3-axis accelerometer and a 3-axis gyroscope. It features a powerful 200MHz main control chip and an embedded Extended Kalman Filter (EKF) algorithm for real-time quaternion-based attitude calculation. The module supports multiple communication interfaces, including USB, RS485, and CAN, offering flexible connectivity options for a wide range of applications. With an adjustable output frequency from 100Hz to 1kHz, the DM-IMU-L1 delivers precise and high-rate data output including acceleration, angular velocity, Euler angles, and quaternions.
A distinctive island structure at the base of the sensor chip enhances shock and vibration resistance, improving the durability and reliability of the module under harsh conditions. The integrated heating circuit maintains a stable operating temperature to effectively reduce gyroscope drift caused by thermal fluctuations, eliminating the need for complex full-range temperature calibrations. This makes the DM-IMU-L1 ideal for applications requiring high accuracy and stability in dynamic environments.
Features:
- Integrated BMI088 6-axis sensor: 3-axis accelerometer + 3-axis gyroscope
- Embedded EKF quaternion-based attitude solver for precise orientation data
- High-speed 200MHz microcontroller for real-time processing
- Multiple communication protocols: USB, RS485, and CAN bus support
- Adjustable output data frequency: 100Hz to 1000Hz
- Built-in heating circuit for temperature stabilization and drift reduction
- Sensor chip designed with island structure for superior shock and vibration resistance
- Outputs include acceleration, angular velocity, Euler angles, and quaternion data
- Compact size (36×26×9 mm) and lightweight (~11.5g)
- Wide input voltage range: 5V to 28V, suitable for various power systems
- Low power consumption with thermal management (approx. 0.34W at 5V)
Applications:
- Robotics: precision motion control and navigation
- UAVs and drones: stable flight attitude measurement and control
- Autonomous vehicles: inertial navigation and stabilization
- Industrial automation: motion tracking and equipment monitoring
- Marine and aerospace: robust orientation sensing in harsh environments
- Virtual reality and augmented reality systems requiring real-time motion tracking
- Research and development in inertial sensing and navigation technologies

Reviews
There are no reviews yet.